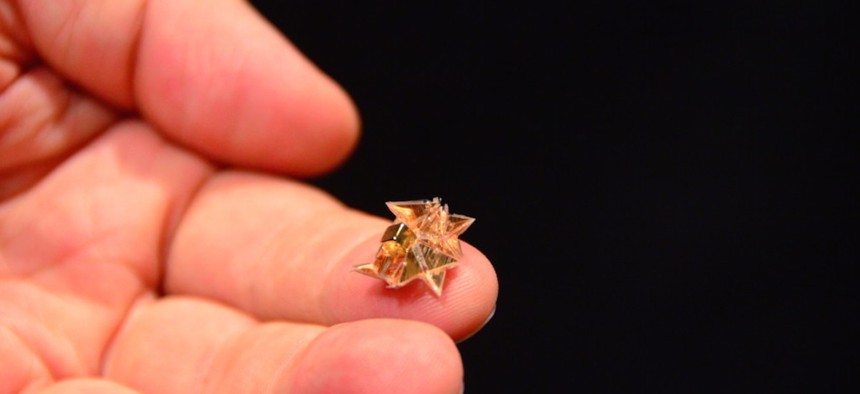
At the 2015 ICRA, researchers from MIT demonstrated an untethered miniature origami robot that self-folds, walks, swims, and degrades Evan Ackerman/IEEE Spectrum/MIT
DARPA Plans Bugbot ‘Olympics’ to Foster Breakthrough in Tiny Machines
Redesigning tiny motors and limbs could make microbots a reality.

Swarms of micro-robots have been a staple of science fiction since Stanisław Lem’s classic 1964 evolutionary tale The Invincible. The U.S. military has been studying “insect cyborgs” since 2006, but has struggled to build tiny machines that can do useful things without a power cord. On Tuesday, the Defense Advanced Research Projects Agency launched a new effort to leapfrog the static state of micro-robot technology.
A new program called SHort-Range Independent Microrobotic Platforms, or SHRIMP, is looking to reward researchers who can overcome the big barrier to micro-robot fielding: creating strong motors that sip power. Called actuators, the electric motors that help robots move and bend are much less energy-efficient than their biological equivalents, which use electrochemical power. Researchers are slowly surmounting that obstacle for large robots, which can carry ever-more-efficient lithium-ion battery packs. But micro-robots aren’t big enough to carry the power supply they need to run their thirsty little legs and arms and do anything interesting, like navigate.
“The current state of insect-scale robotics has focused primarily on mobility, with limited additional functionality due to constraints imposed by energy-inefficient actuation and limited energy storage at this scale. Thus, such robots tend to be simple, possess limited intelligence, and lack the power, navigation, actuation, and control to accomplish tasks beyond moving,” notes DARPA’s broad agency announcement.
The participants will compete in a series of “Olympic-themed contests,” DARPA says.
The competition will be divided into three parts. The first will look at new materials, seeking to increase the degree of force that the actuators can output; the second will look to increase the transduction efficiency of limbs and other appendages. The third phase will combine the first two phases. While they didn't go into too much detail, don't expect bugs to run a hundred-meter dash. The contest will include demonstrations of "static and dynamic displacements [meaning: powered joint flexibility] along with positional accuracy."
“Whether in a natural-disaster scenario, a search-and-rescue mission, a hazardous environment, or other critical relief situation, robots have the potential to provide much-needed aid and support,” said Ronald Polcawich, a DARPA program manager in the Microsystems Technology Office, or MTO, in a press release.